During my Junior Year of college, I took a course on Mechatronics. This was probably my favorite engineering course I took because it was finally something hands on. As a mechanical engineer, it's kind of a dream to be able to actually make something tangible. Even better, something that moves! Isn't that kind of the whole reason someone does MechE? This course was awesome! I learned in depth how microcontrollers work, how different motors function, and how different sensors communicate. And beyond the pencil paper learning, this was the first "lab" class that I actually looked forward too (RIP Chem Lab). We learned how to program the Arduino, build circuits, and use everything from simple LEDs lighting up to controlling motors.
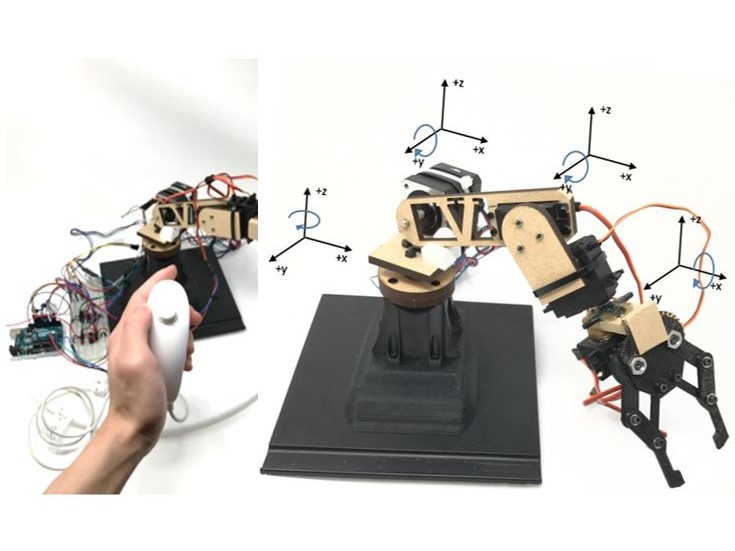
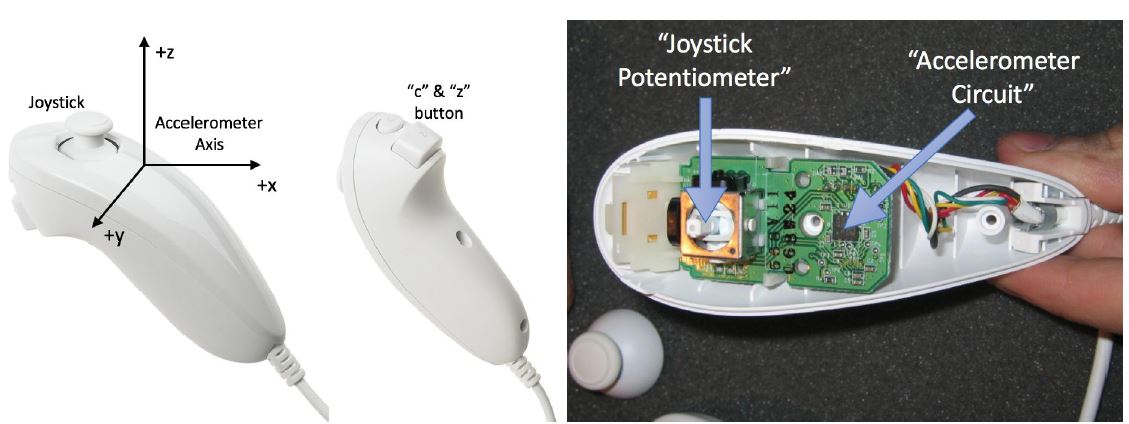
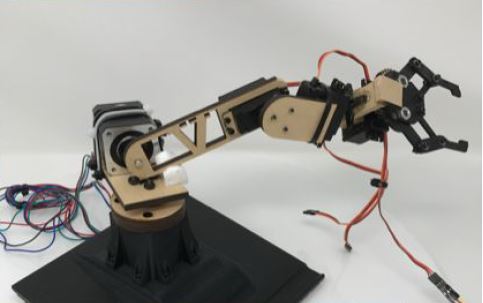
At the end of the semester, we had a final project where we use what learned throughout the course and make our own project. We were encouraged to go beyond what we learned and make something challenging. Being a baller on a budget I had to be creative with resources I already, because I didn't have $100 to drop on more parts. Combined with my interest in robots, I decided to make a robot arm that is controlled by a Nintendo Wii Nunchuck. How hard could it be?
This is where I learned (the hard way) that parts ordered online don't always have "2-day Prime Shipping" and that just because I have the plan in my head or even on paper, doesn't mean that when the parts come in, that everything is going to assemble perfectly like Ikea furniture.
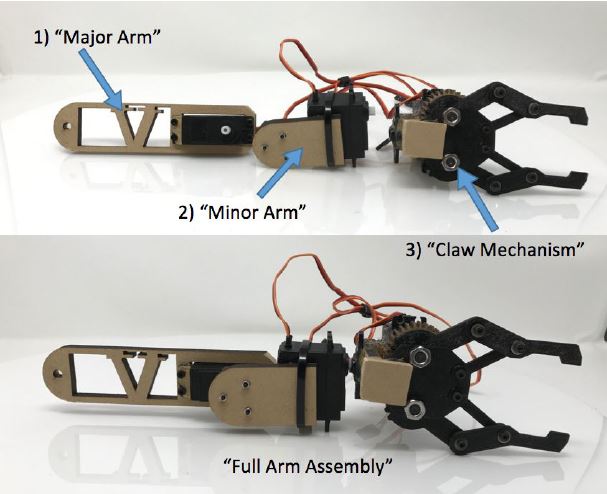
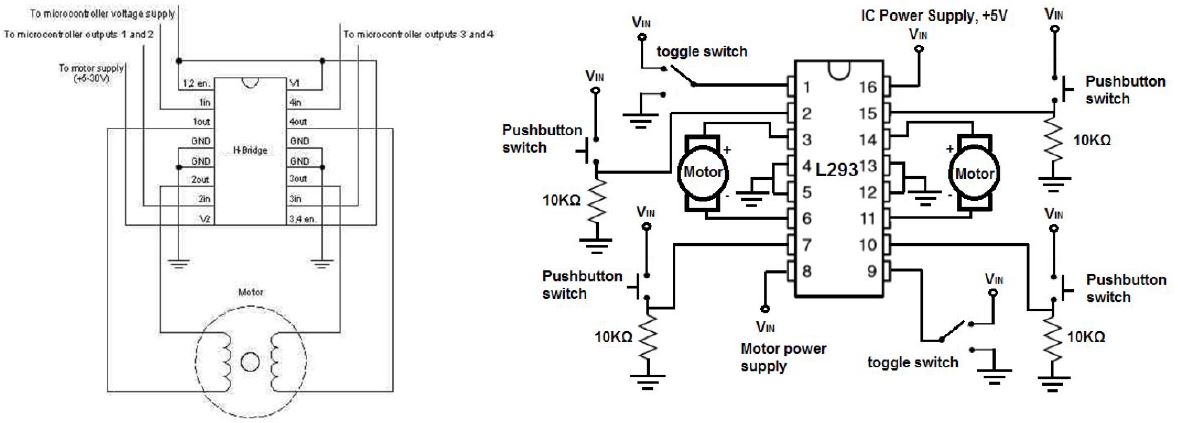
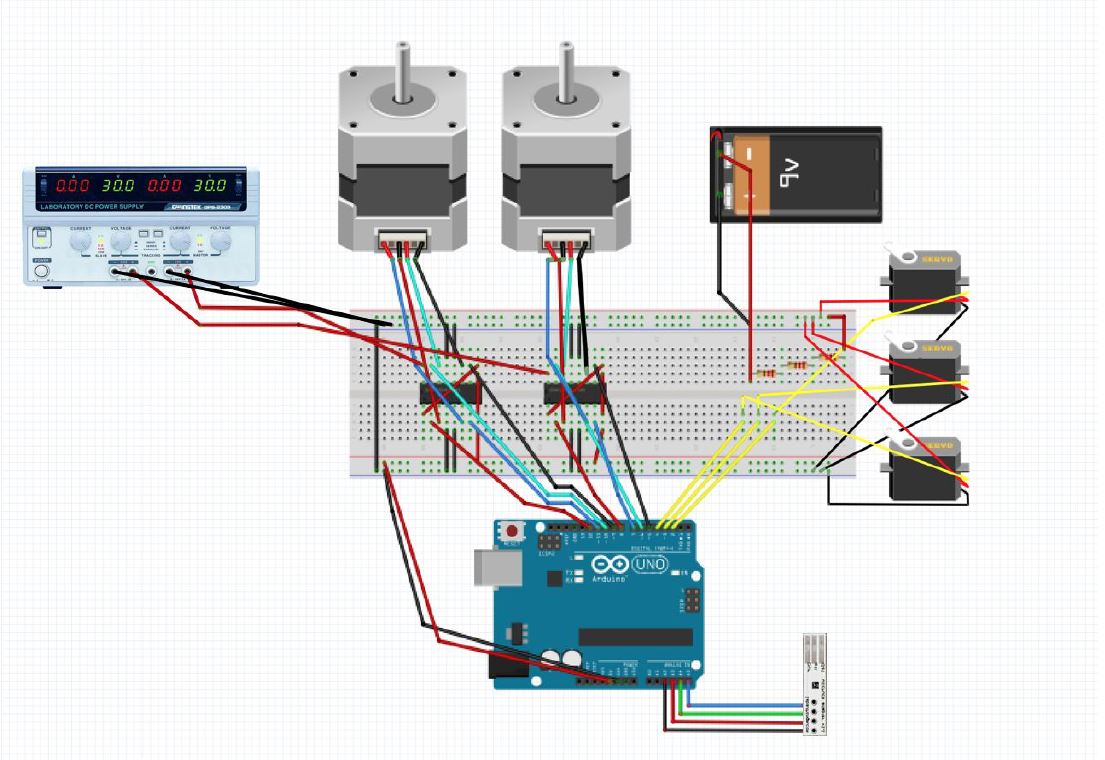
So by now you're probably wondering why I called this project "Wiik Arm". That's because my robot arm was indeed very wiik. The driver circuits I ordered to help control the two main stepper motors (bearing the most torque), unfortunately were faulty. I was in panic mode since the project was due in a few days and there was no way with shipping times, I was going to be able to get new parts. Scrambling around, I managed to find two H-Bridges that would just possibly work. And in the end, althouhg they couldn't draw the ideal amount of current, making my robot arm a wiik arm, it was still able to work and that was pretty cool to see.

Mistakes I made:
- Not ordering multiple parts (because Murphy's Law is undefeated)
- Create realistic scope (because it always seems easier on paper)
Skills I developed and used:In case your curious (click to view):
- Arduino (using microcontrollers and programming them)
- Sensors and Motors (accelerometers, stepper motors, and servo motors)
- CAD and 3D Printing (Creo)
Final Report